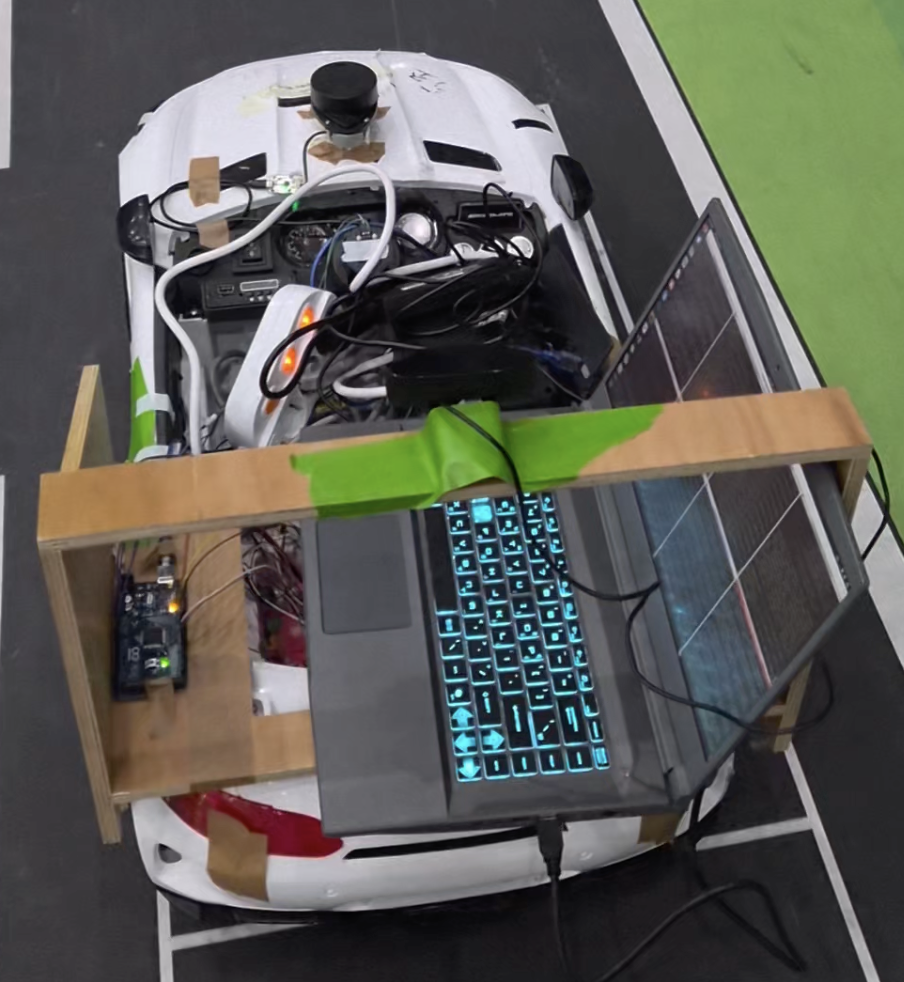
AI-SW Car Development and Driving Retrospective
“The most important thing is data.”
Trouble Shooting
1. Hardware Issues
I think I spent almost six to seven hours solving this hardware issue. I tested by replacing parts such as the motor, variable resistor, motor driver, and jumper cables. In the end, the issue was solved when I replaced the Arduino board with an official one.
The same was true for port conversion and the issue where tty/AC* did not appear.
-> Solved by replacing the Arduino board with an official one.
2. Software Issues
- Depending on the ROS2 program being run, some wheels rotated while others did not.
-> This was caused by mixed-up variable names and serial ports in the code. I reset the numbering and rebuilt to solve it.
- Data collection was delayed, so we failed to secure enough data.
-> Trained together with a dataset from two years ago.
Lane recognition
- The car must not touch the white lane line. Avoiding the lane line is better than returning after touching it.
- During labeling, the lane line should have been excluded.
- Traffic light color recognition needs improvement through HSV range adjustment.
Model training
- YOLOv8 struggles to recognize distant objects, so the labeling range needs to be reduced.
- The labeled
classNameand the code-sideclassNamemust match. - Python code needed more modification than expected.
- The lane2 and traffic_light data were imbalanced. lane2 had about five times more examples, making effective training difficult.
Roboflow & Colab
Total dataset: about 1,500 images
lane2: about 1,350 images
traffic_light: about 150 images
First Dataset
Dataset Split
| Type | Percentage | Count | Unit |
|---|---|---|---|
| Train Set | 91% | 2634 | Images |
| Valid Set | 9% | 249 | Images |
| Test Set | 0% | 0 | Images |
Preprocessing
| Item | Configuration |
|---|---|
| Auto-Orient | Applied |
| Resize | Stretch to 640x480 |
Augmentations
| Item | Configuration |
|---|---|
| Outputs per training example | 3 |
| Flip | Horizontal |
| Crop | 8% Minimum Zoom, 22% Maximum Zoom |
| Brightness | Between -24% and +24% |
| Noise | Up to 1.53% of pixels |
Second Dataset
Dataset Split
| Type | Percentage | Count | Unit |
|---|---|---|---|
| Train Set | 91% | 2667 | Images |
| Valid Set | 9% | 249 | Images |
| Test Set | 0% | 0 | Images |
Preprocessing
| Item | Configuration |
|---|---|
| Auto-Orient | Applied |
| Resize | Stretch to 640x480 |
Augmentations
| Item | Configuration |
|---|---|
| Outputs per training example | 3 |
| Crop | 8% Minimum Zoom, 22% Maximum Zoom |
| Brightness | Between -24% and +24% |
Third Dataset
Dataset Split
| Type | Percentage | Count | Unit |
|---|---|---|---|
| Train Set | 82% | 1779 | Images |
| Valid Set | 18% | 384 | Images |
| Test Set | 0% | 0 | Images |
Preprocessing
| Item | Configuration |
|---|---|
| Auto-Orient | Applied |
| Resize | Fit, with black edges, in 640x480 |
Augmentations
| Item | Configuration |
|---|---|
| Outputs per training example | 3 |
| Crop | 0% Minimum Zoom, 30% Maximum Zoom |
| Hue | Between -10° and +10° |
| Brightness | Between 0% and +25% |
| Exposure | Between -5% and +5% |
| Blur | Up to 2px |
| Noise | Up to 1.5% of pixels |
All three datasets above were trained with YOLOv8, and the third training run showed the best performance.
When training the dataset created in Roboflow on Colab, the following code was required:
- Because our data labeling was done with polygons, the task had to be set as a segmentation task.
- A normal
yolov8n.ptonly knows how to find boxes, while a model with -seg at the end has an additional neural network head that draws masks, or shapes, as well as boxes.
task=segment mode=train model=yolov8n-seg.ptTraining Result
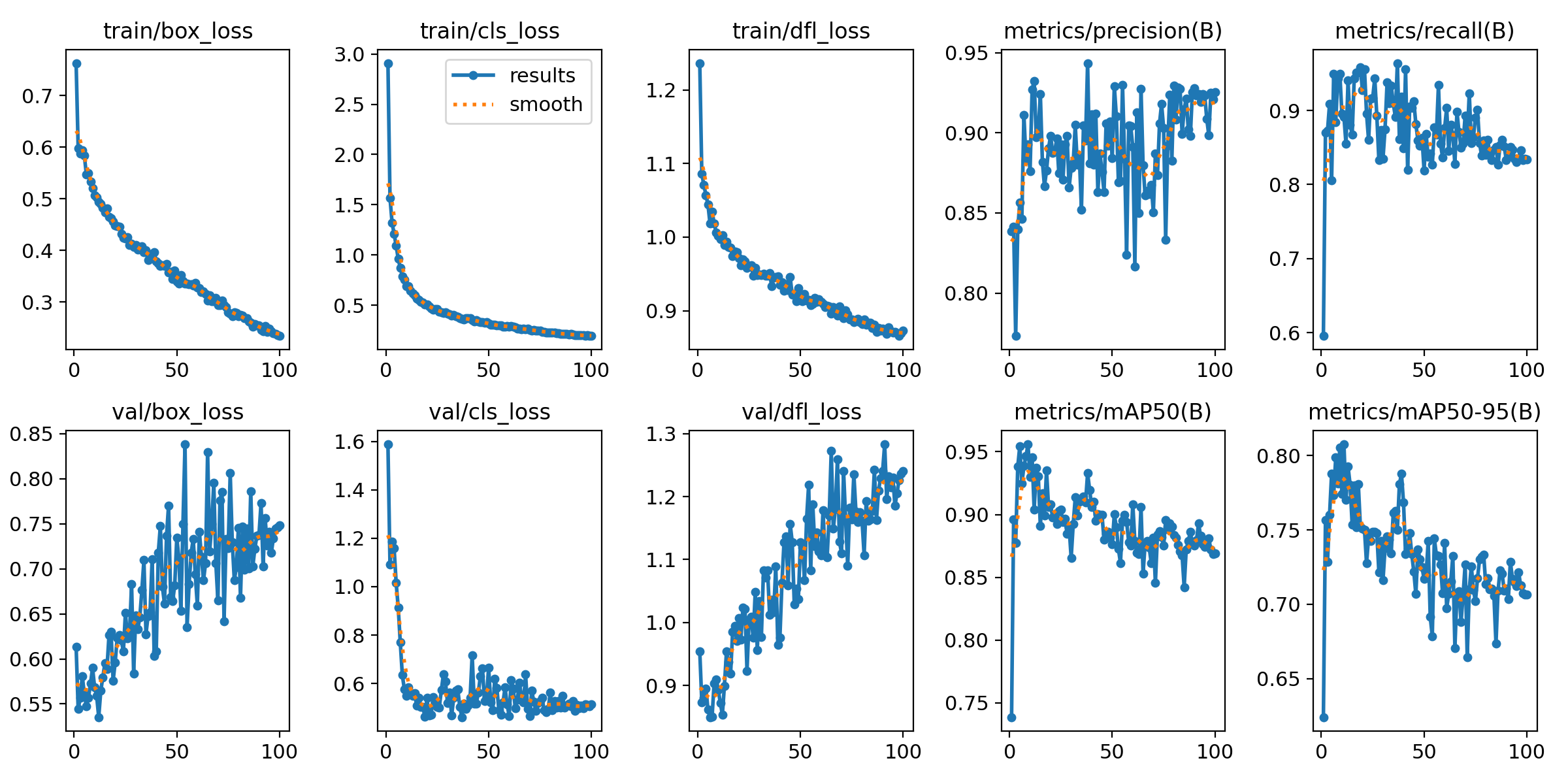
Result Interpretation
A. Loss Functions: Lower Is Better
These scores show how wrong the model is compared to the correct answer. The closer to 0, the better.
box_loss (Bounding Box Loss)
- Meaning: “How accurately did the model draw the box?”
- Detail: Calculated based on how much the predicted box overlaps with the ground-truth box, using IoU.
cls_loss (Classification Loss)
- Meaning: “Did the model identify the object’s class correctly?”
- Detail: Increases when a lane is misclassified as a traffic light, or background is recognized as an object.
dfl_loss (Distribution Focal Loss)
- Meaning: “Are the box boundaries clear?”
- Detail: A loss value that helps compensate when object edges are blurry.
B. Metrics: Higher, Closer to 1.0, Is Better
Precision
- Meaning: “Of everything the model claimed to find, how many were actually correct?”
- Example: If the model detected traffic lights 100 times and 90 were real, precision = 0.9.
Recall
- Meaning: “Of all real answers that exist, what percentage did the model find?”
- Example: If there are 100 traffic lights on the track and the model finds only 80, recall = 0.8.
mAP50 (mean Average Precision @ IoU=0.5)
- Meaning: A prediction is considered correct when the predicted box and ground-truth box overlap by 50% or more.
- Result: 0.948
- Analysis: val_loss increased after epoch 20, so the model appears to have overfit the training data.
Actual driving evaluation
- In autonomous driving,
mAP50is the most important metric.- Goal: complete two laps of the track within four minutes.
- Result: the car touched the white line but did not deviate significantly. mAP50 of 94.8% is sufficiently good.
- Improvement: after avoiding the white line, aim for better performance by driving closer to the center.
mAP50-95 (mean Average Precision @ IoU=0.5:0.95)
- Meaning: The average calculated while increasing the correctness threshold from 50% to 95% in 5% increments.
- Feature: Because this is a stricter standard, the score appears much lower.
2. Mathematical Formula for mAP
mAP is calculated in the order IoU -> Precision/Recall -> AP -> mAP.
Step 1: IoU (Intersection over Union)
Calculate how much two boxes, the predicted box and the ground-truth box, overlap.
- If the IoU value exceeds a certain threshold, such as 0.5, it is judged as a True Positive.
- The higher the value, the more accurately the boxes match.
Step 2: Precision and Recall
- TP (True Positive): Correctly found
- FP (False Positive): Incorrectly found
- FN (False Negative): Missed
Result Values
| Class | Images | Instances | Box(P) | R | mAP50 | mAP50-95 |
|---|---|---|---|---|---|---|
| all | 249 | 276 | 0.901 | 0.963 | 0.948 | 0.803 |
| lane2 | 231 | 236 | 0.978 | 0.951 | 0.974 | 0.829 |
| traffic light | 39 | 40 | 0.823 | 0.975 | 0.923 | 0.777 |
- Note:
Precision(0.823)is lower thanRecall(0.975). This can be interpreted as: “The model almost never misses traffic lights, since recall is high, but sometimes mistakes non-traffic-lights for traffic lights, since precision is low.”
What Was Lacking
Control Part (Motion Planner)
Lane control signal
- In
motion_planner.py, both slope and coordinates should have been used when generating the lane control signal for accurate operation. - The slope value changes depending on the camera’s field of view, such as near distance vs far distance.
- It is not possible to generate the control signal with slope alone.
LiDAR sensor
- Test environment: range 0-70°, min_dist = 0.5m, max_dist = 1.0m
- Worked normally in the test environment.
- Did not work in the real driving environment, so parameter readjustment is needed.
Closing
This was my first autonomous driving project, covering data collection, preprocessing, model training and evaluation, code fixes, and actual driving over four days during vacation: Friday, Saturday, Monday, and Tuesday.
On Friday and Saturday, we collected and preprocessed data, labeled it, and trained the model. On Monday, we tried a test drive, but the trained model could not drive properly. So we re-labeled sample data, trained again, and drove again.
Through this process, we confirmed that the model trained on the final dataset could drive normally. However, issues with traffic_light and LiDAR were only discovered on Tuesday. After finishing late on Monday night, we came back Tuesday, made fixes for about two hours, and then performed the actual run.
The result was somewhat disappointing, an encouragement prize, but if I participate in a similar competition later, I think I can achieve a better result based on the trial and error I learned here.
[1/16 ~ 1/20] AI-SW Car development and driving retrospective completed.
댓글